Abstract
Correlation filter (CF) has recently exhibited promising performance in visual object tracking for unmanned aerial vehicle (UAV). Such online learning method heavily depends on the quality of the training-set, yet complicated aerial scenarios like occlusion or out of view can reduce its reliability. In this work, a novel time slot-based distillation approach is proposed to efficiently and effectively optimize the training-set’s quality on the fly. A cooperative energy minimization function is established to score the historical samples adaptively. To accel-erate the scoring process, frames with high confident tracking results are employed as the keyframes to divide the tracking process into multiple time slots. After the establishment of a new slot, the weighted fusion of the previous samples generates one key-sample, in order to reduce the number of samples to be scored. Besides, when the current time slot exceeds the maximum frame number, which can be scored, the sample with the lowest score will be discarded. Consequently, the training-set can be efficiently and reliably distilled. Comprehensive tests on two well-known UAV benchmarks prove the effectiveness of our method with real-time speed on a single CPU.
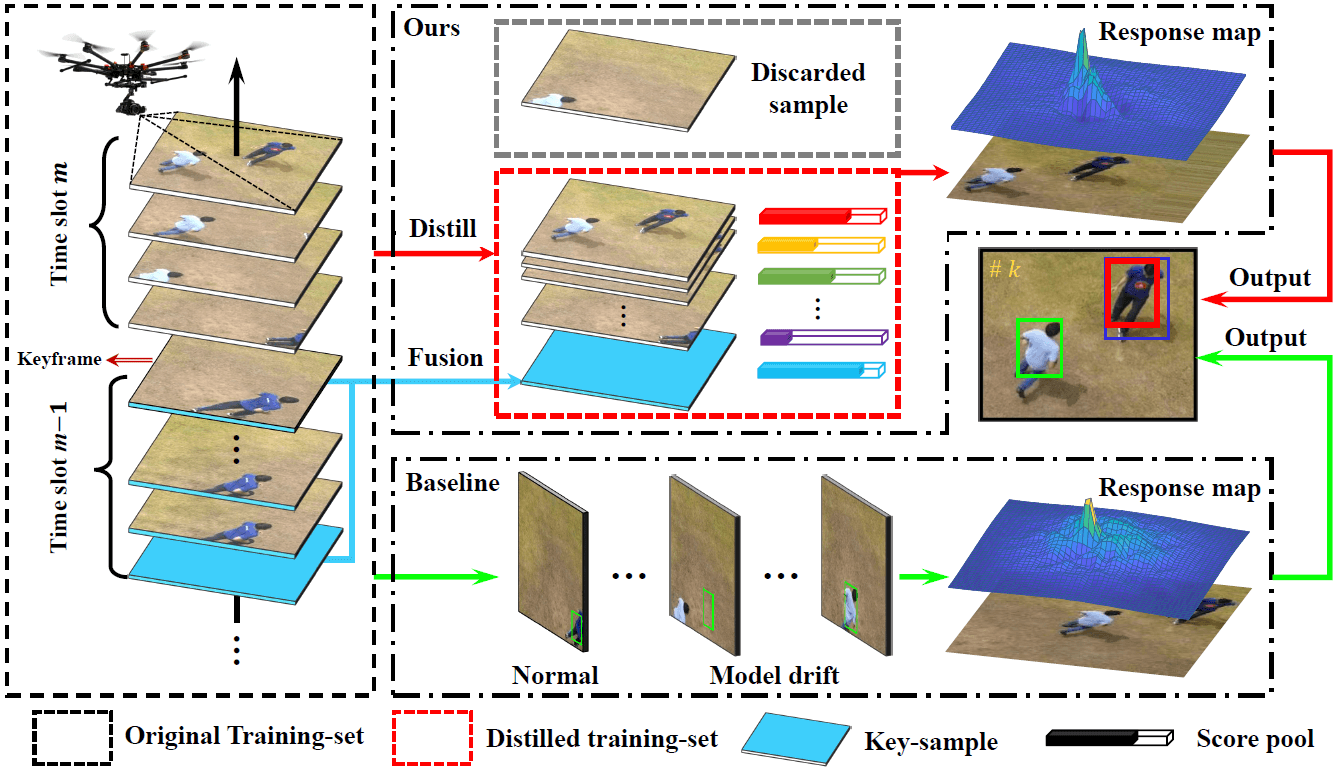 Comparison between our TSD tracker with the baseline BACF tracker
Comparison between our TSD tracker with the baseline BACF tracker