2026-05: Golden Eagle Award!
Our edge intelligent vision system has won the Golden Eagle Award at the World Drone Congress with a high-authority recognition!
Congratulations!
2025-12: Best Paper in AI in Robotics Award!
Our paper “Why not DeepSeek for Any-Scale Thermal Super-Resolution?” is awarded the Best Paper in AI in Robotics Award of IEEE International Conference on Robotics and Biomimetics (IEEE ROBIO 2025)!
Congratulations!
2025-10: 2025 Google PhD Fellowship!
Ziang Cao is awarded with 2025 Google PhD Fellowship!
Congratulations!
2025-09: CIIF University Exhibition Innovation Award!
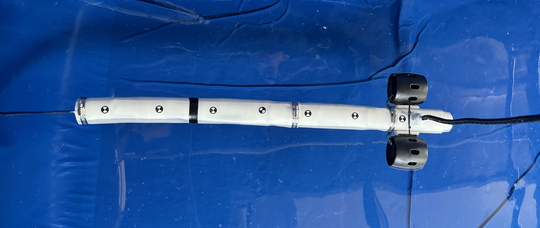
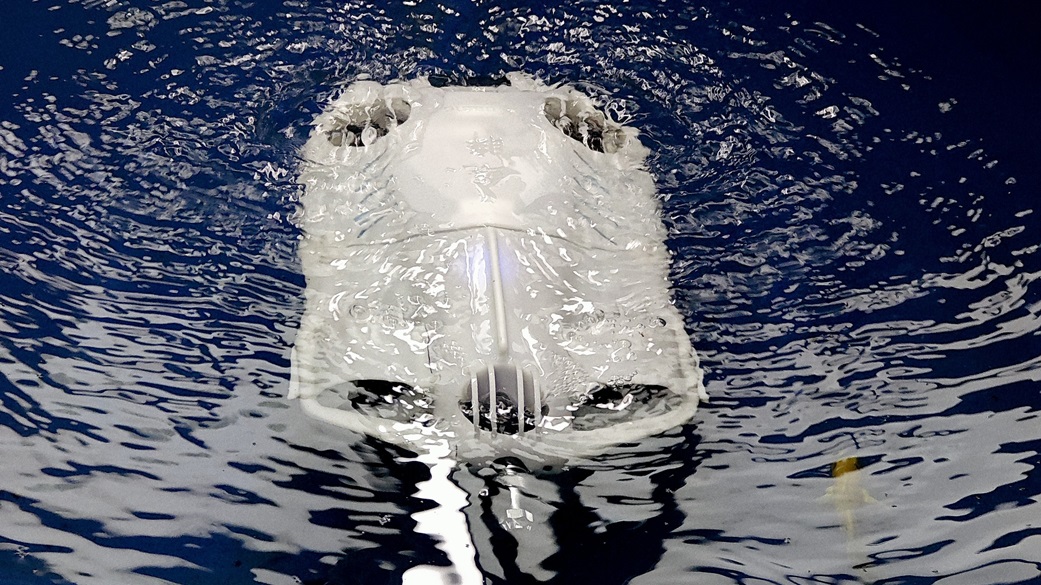
Our project “Edge-AI Powered Snake Robot for Cross-Domain Operations” is awarded the University Exhibition Innovation Award of China International Industry Fair (CIIF)!
Congratulations!
2025-09: World's Top 2% Scientists 2025 by Stanford University and Elsevier!
Changhong Fu is ranked on the World's Top 2% Scientists 2025 by Stanford University and Elsevier.
Congratulations!
2025-09: One paper accepted by NeurIPS 2025!
Our papers “Lattice Boltzmann Model for Learning Real-World Pixel Dynamicity” is accepted by NeurIPS 2025 in San Diego, USA!
2025-07: Four papers accepted by IROS 2025!
Our papers “AnyTSR: Any-Scale Thermal Super-Resolution for UAV”, “EdgeSpotter: Multi-Scale Dense Text Spotting for Industrial Panel Monitoring”, “EdgeSR: Reparameterization-Driven Fast Thermal Super-Resolution for Edge Electro-Optical Device”, and “U-Snake: A Small-Sized Smart Underwater Snake Robot”, are accepted by IROS 2025 in Hangzhou, China!
2024-11: National Scholarship of China!
Liangliang Yao is awarded the National Scholarship of China for Graduate Students.
Congratulations!
2024-09: World's Top 2% Scientists 2024 by Stanford University and Elsevier!
Changhong Fu is ranked on the World's Top 2% Scientists 2024 by Stanford University and Elsevier.
Congratulations!
2024-07: Toshio Fukuda Best Paper Award in Mechatronics!
Our paper “SAM-DA: UAV Tracks Anything at Night with SAM-Powered Domain Adaptation” is awarded the Toshio Fukuda Best Paper Award in Mechatronics of ICARM 2024!
Congratulations!
2024-05: 2024 Qualcomm Innovation Fellowship!
Junjie Ye is awarded with 2024 Qualcomm Innovation Fellowship!
Congratulations!
2024-04: One paper accepted by CVPR 2024!
Our papers “NetTrack: Tracking Highly Dynamic Objects with a Net” is accepted by CVPR 2024 in Seattle WA, USA, 2024!
2024-04: Outstanding Graduate Awards!
-
Kunhan Lu and
Jilin Zhao are awarded with Outstanding Graduate of Tongji University.
Congratulations!
2024-01: 2023 Chinese Institute of Electronics master’s degree thesis incentive program!
The graduation thesis of Junjie Ye is selected into the 2023 Chinese Institute of Electronics master’s degree thesis incentive program.
Congratulations!
2023-12: $60,000 NVIDIA Graduate Fellowship Awards!
Yiming Li is awarded with $60,000 NVIDIA Graduate Fellowship Awards.
Congratulations!
2023-12: Youth Teachers’ Teaching Competition!
Changhong Fu is ranked on the second prize in the 2023 Youth Teachers’ Teaching Competition at Tongji University.
Congratulations!
2023-10: One highly cited paper!
Our paper “All-Day Object Tracking for Unmanned Aerial Vehicle” achieves prominence as a highly cited paper.
Congratulations!
2023-10: 2023 Stanford University Top 2% Scientists List!
Changhong Fu is ranked on the 2023 Stanford University Top 2% Scientists list.
Congratulations!
2023-10: Outstanding thesis award!
Junjie Ye is awarded outstanding thesis award for the graduation thesis.
Congratulations!
2023-10: National Scholarship of China!
Kunhan Lu is awarded the National Scholarship of China for Graduate Students.
Congratulations!
2023-08: One paper accepted by IEEE TPAMI!
Our paper “Towards Real-World Visual Tracking with Temporal Contexts” is accepted by TPAMI!
2023-07: One paper accepted by ICCV 2023!
Our paper “PVT++: A Simple End-to-End Latency-Aware Visual Tracking Framework” is accepted by ICCV 2023!
2023-07: Excellent Science and Innovation Education Program!
- Our project “Modular Biomimetic Snake-like Robot (including Visual Large-scale Model Base Design and Rapid Edge Deployment)” has been selected as a Key Project under “ Excellent Science and Innovation Education Program” at Tongji University!
2023-04: Outstanding Graduate Awards!
- Junjie Ye, Haoyang Li, Haobo Zuo, and Liangliang Yao are awarded with Outstanding Graduate of Shanghai.
-
Xining Lu is awarded with Outstanding Graduate of Tongji University.
Congratulations!
2023-01: Two papers accepted by ICRA 2023!
Our papers “SGDViT: Saliency-Guided Dynamic Vision Transformer for UAV Tracking”, and “Continuity-Aware Latent Interframe Information Mining for Reliable UAV Tracking” are accepted by ICRA 2023 in ExCeL London!
2022-11: Highest academic honor of Tongji!
- Junjie Ye is awarded the Academic Pioneer of Tongji University (top 10 among all graduate students of Tongji).
-
Haobo Zuo is awarded
the Academic Star Model of Tongji University (top 5 among all undergraduate students of Tongji).
Congratulations!
2022-10: Outstanding thesis award!
Fuling Lin are awarded outstanding thesis award for the graduation thesis.
Congratulations!
2022-10: National Scholarship of China!
Junjie Ye is awarded the National Scholarship of China for Graduate Students. Congratulations!
2022-06: Four papers accepted by IROS 2022!
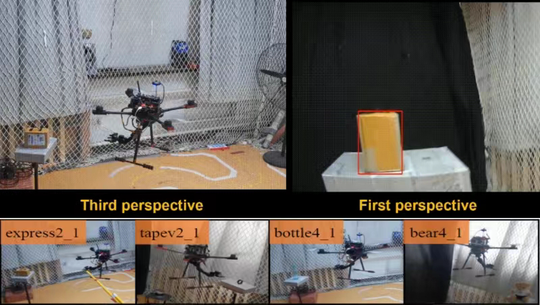
Our papers “Siamese Object Tracking for Vision-Based UAM Approaching with Pairwise Scale-Channel Attention”, “Local Perception-Aware Transformer for Aerial Tracking”, “HighlightNet: Highlighting Low-Light Potential Features for Real-Time UAV Tracking”, and “End-to-End Feature Decontaminated Network for UAV Tracking”, are accepted by IROS 2022 in Kyoto, Japan!
2022-03: 17th “Challenge Cup” China College Students’ Extracurricular Academic and Scientific Works Competition!
Our program “Miles of paddy scent tell of a bumper crop year”: The intelligent identification and prevention solution for crops based on deep learning wins the First Prize at the 17th “Challenge Cup” China College Students’ Extracurricular Academic and Scientific Works Competition!
2022-03: Two papers accepted by CVPR 2022!
Our papers “Unsupervised Domain Adaptation for Nighttime Aerial Tracking” and “TCTrack: Temporal Contexts for Aerial Tracking” are accepted by CVPR 2022 in New Orleans, Louisiana, USA!
2022-02: Two papers accepted by ICRA 2022!
Our papers “Tracker Meets Night: A Transformer Enhancer for UAV Tracking” (also for IEEE Robotics and Automation Letters, RA-L) and “Ad2Attack: Adaptive Adversarial Attack on Real-Time UAV Tracking” are accepted by ICRA 2022 in Philadelphia (PA), USA!
2021-11: Academic Stars of Tongji!
- Bowen Li is awarded the Academic Star Model of Tongji University (top 5 among all undergraduate students of Tongji).
-
Ziang Cao is awarded
the Academic Star of Tongji University (top 15 among all undergraduate students of Tongji).
Congratulations!
2021-10: National Scholarship of China!
- Fuling Lin is awarded the National Scholarship of China for Graduate Students.
-
Bowen Li is awarded
the National Scholarship of China for Undergraduate Students.
Congratulations!
2021-07: One paper accepted by ICCV 2021!
Our paper “HiFT: Hierarchical Feature Transformer for Aerial Tracking” is accepted by ICCV 2021!
2021-07: Two papers accepted by IROS 2021!
Our papers “SiamAPN++: Siamese Attentional Aggregation Network for Real-Time UAV Tracking”, and “DarkLighter: Light up the Darkness for UAV Tracking” are accepted by IROS 2021 in Prague, Czech Republic!
2021-03: Latency-aware tracking benchmark
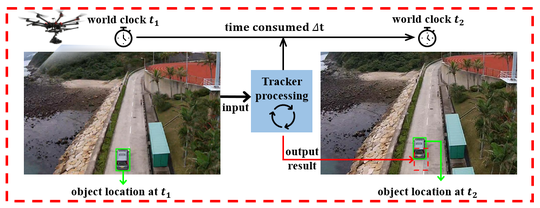
We formulate a latency-aware benchmark with new metrics for a more realistic evaluation. A new predictive visual tracking baseline is developed to compensate for the latency stemming from the onboard computation. More details can be found here!
2021-02: Four papers accepted by ICRA 2021!
Our papers “Siamese Anchor Proposal Network for High-Speed Aerial Tracking”, “ADTrack: Target-Aware Dual Filter Learning for Real-Time Anti-Dark UAV Tracking”, “Online Recommendation-based Convolutional Features for Scale-Aware Visual Tracking”, and “Mutation Sensitive Correlation Filter for Real-Time UAV Tracking with Adaptive Hybrid Label”, are accepted by ICRA 2021 in Xi’an, China!
2021-02: The best review of object tracking in 2020
Our paper “Correlation Filters for Unmanned Aerial Vehicle-Based Aerial Tracking: A Review and Experimental Evaluation” is awarded as the best review of object tracking in 2020! (See more)
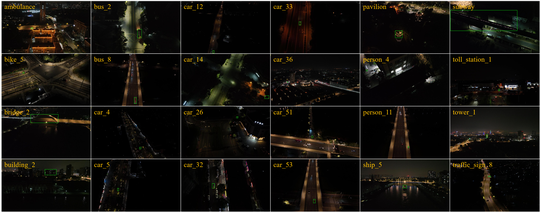
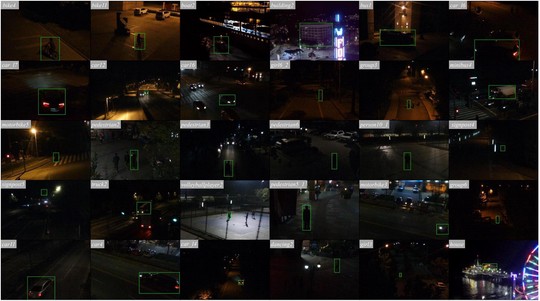
2021-02: UAVDark135
A pioneering UAV dark tracking benchmark consists of 135 videos with a variety of objects. (See more)
2020-07: Five papers accepted by IROS 2020!
Our papers “DR^2Track: Towards Real-Time Visual Tracking for UAV via Distractor Repressed Dynamic Regression”, “Augmented Memory for Correlation Filters in Real-Time UAV Tracking”, “Automatic Failure Recovery and Re-Initialization for Online UAV Tracking with Joint Scale and Aspect Ratio Optimization”, “Towards Robust Visual Tracking for Unmanned Aerial Vehicle with Tri-Attentional Correlation Filters”, and “Learning Consistency Pursued Correlation Filters for Real-Time UAV Tracking” are accepted by IROS 2020 in Las Vegas, USA!
2020-07: Outstanding Graduate Awards
- Yiming Li, Weijiang Xiong, Junjie Ye and Yujie He are awarded with Outstanding Graduate of Shanghai.
-
Juntao Xu is awarded with Outstanding Graduate of Tongji University.
Congratulations!
2020-02: One paper accepted by CVPR 2020!
Our paper “AutoTrack: Towards High-Performance Visual Tracking for UAV with Automatic Spatio-Temporal Regularization” is accepted by CVPR 2020 in Seattle, United States!
2020-01: Three papers accepted by ICRA 2020!
Our papers “BiCF: Learning Bidirectional Incongruity-Aware Correlation Filter for Efficient UAV Object Tracking”, “Training-set Distillation for Real-Time UAV Object Tracking“, and “Keyfilter-Aware Real-Time UAV Object Tracking”, are accepted by ICRA 2020 in Paris, France!
2019-11: IROS 2019
The 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2019) will be held on November 4 – 8, 2019 in Macau, China.
Welcome to the Workshop on Fast Neural Perception and Learning for Intelligent Vehicles and Robotics !
2019-07: One paper accepted by ICCV 2019!
Our paper “Learning Aberrance Repressed Correlation Filters for Real-Time UAV Tracking” is accepted by ICCV 2019 in Seoul, Korea!
2019-07: One paper accepted by IROS 2019!
Our paper “Boundary Effect-Aware Visual Tracking for UAV with Online Enhanced Background Learning and Multi-Frame Consensus Verification” is accepted by IROS 2019 in Macau, China!
2019-06: Best Bachelor Thesis Awards
-Yiyong Sun is awarded with Best Bachelor Thesis of Tongji University.
-
Fuling Lin is awarded with Best Bachelor Thesis Scholarship of Tongji-Hirschvogel.
Congratulations!