Object Saliency-Aware Dual Regularized Correlation Filter for Real-Time Aerial Tracking
Abstract
Spatial regularization has proven itself to be an effective method in terms of alleviating the boundary effect and boosting the performance of a discriminative correlation filter (DCF) in aerial visual object tracking. However, existing spatial regularization methods usually treat the regularizer as a supplementary term apart from the main regression and neglect to regularize the filter involved in the correlation operation. To address the aforementioned issue, this work introduces a novel object saliency-aware dual regularized correlation filter, i.e., DRCF. Specifically, the proposed DRCF tracker suggests a dual regularization strategy to directly regularize the filter involved with the correlation operation inside the core of the filter generating ridge regression. This allows the DRCF tracker to suppress the boundary effect and consequently enhance the performance of the tracker. Furthermore, an efficient method based on a saliency detection algorithm is employed to generate the dual regularizers dynamically and provide the regularizers with online adjusting ability. This enables the generated dynamic regularizers to automatically discern the object from the background and actively regularize the filter to accentuate the object during its unpredictable appearance changes. By the merits of the dual regularization strategy and the saliency-aware dynamical regularizers, the proposed DRCF tracker performs favorably in terms of suppressing the boundary effect, penalizing the irrelevant background noise coefficients and boosting the overall performance of the tracker. Exhaustive evaluations on 193 challenging video sequences from multiple well-known challenging aerial object tracking benchmarks validate the accuracy and robustness of the proposed DRCF tracker against 27 other state-of-the-art methods. Meanwhile, the proposed tracker can perform real-time aerial tracking applications on a single CPU with a sufficient speed of 38.4 frames per second.
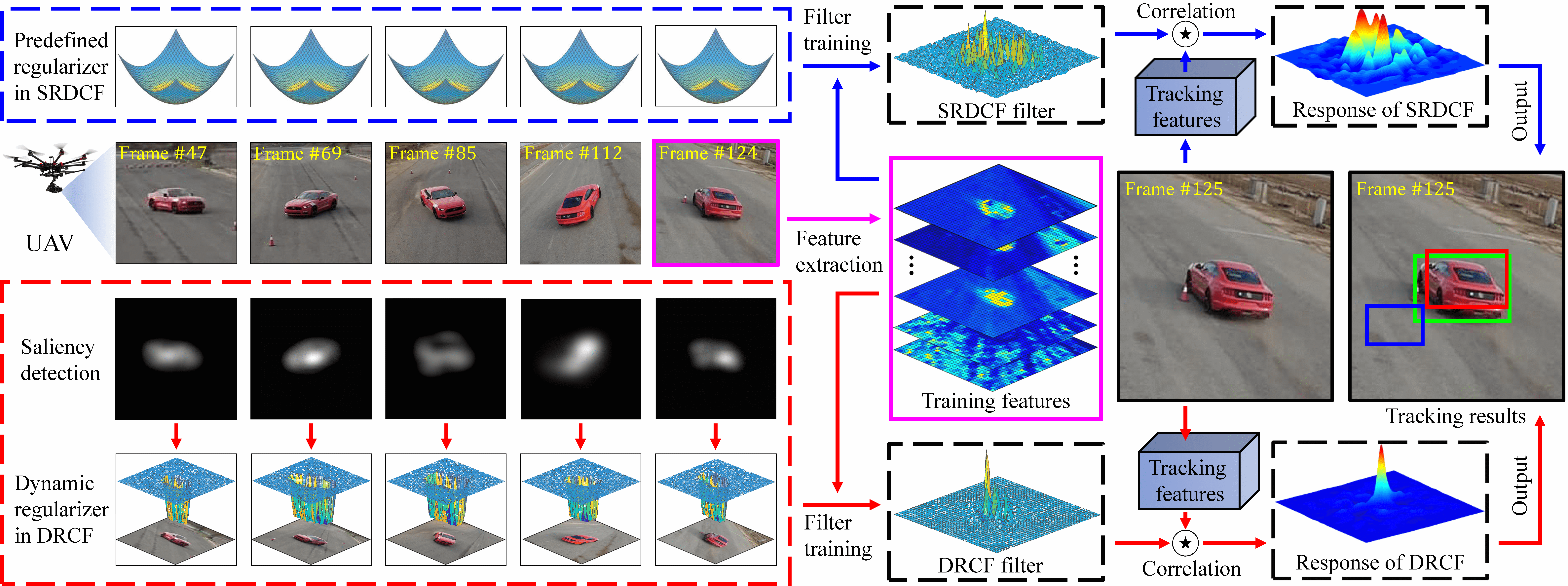 Comparison between the tracking pipeline of the baseline SRDCF tracker and the proposed DRCF tracker.
Comparison between the tracking pipeline of the baseline SRDCF tracker and the proposed DRCF tracker.