Abstract
Recently, the Siamese-based method has stood out from multitudinous tracking methods owing to its state-of-the-art (SOTA) performance. Nevertheless, due to various special challenges in UAV tracking, e.g., severe occlusion, and fast motion, most existing Siamese-based trackers hardly combine superior performance with high efficiency. To this concern, in this paper, a novel attentional Siamese tracker (SiamAPN++) is proposed for real-time UAV tracking. By virtue of the attention mechanism, the attentional aggregation network (AAN) is conducted with self-AAN and cross-AAN, raising the expression ability of features eventually. The former AAN aggregates and models the self-semantic interdependencies of the single feature map via spatial and channel dimensions. The latter aims to aggregate the cross-interdependencies of different semantic features including the location information of anchors. In addition, the dual features version of the anchor proposal network is proposed to raise the robustness of proposing anchors, increasing the perception ability to objects with various scales. Experiments on two well-known authoritative benchmarks are conducted, where SiamAPN++ outperforms its baseline SiamAPN and other SOTA trackers. Besides, real-world tests onboard a typical embedded platform demonstrate that SiamAPN++ achieves promising tracking results with real-time speed.
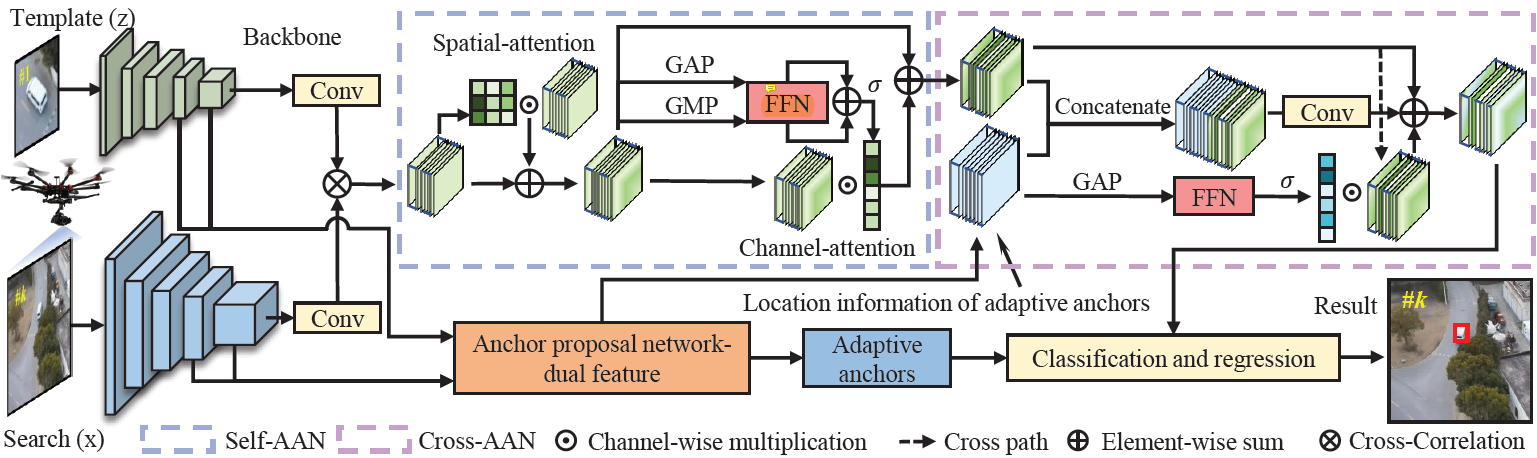 The overview of the SiamAPN++ tracker.
The overview of the SiamAPN++ tracker.