ReCF: Exploiting Response Reasoning for Correlation Filters in Real-Time UAV Tracking
Abstract
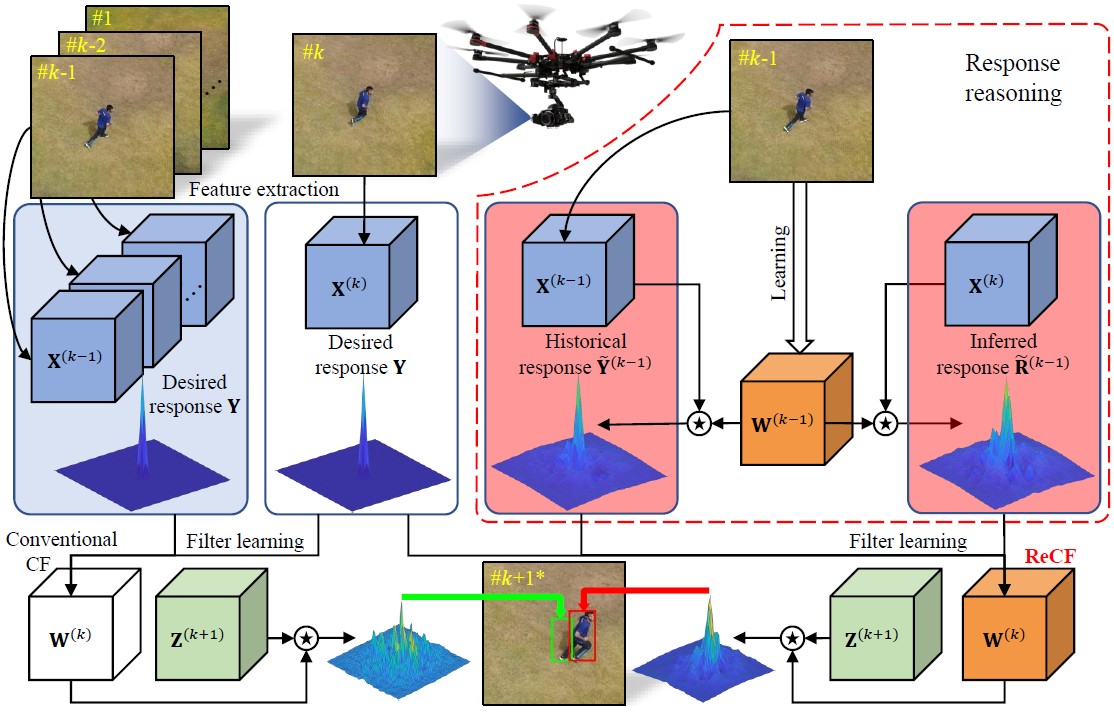
Object tracking is a fundamental task for the visual perception system on the intelligent unmanned aerial vehicle (UAV). The high efficiency of correlation filter (CF) based trackers has advanced the widespread development of online UAV object tracking. This kind of method can effectively train a filter to discriminate the target from the background. However, most CF-based methods require a fixed label function over all the previous samples, leading to over-fitting and filter degradation, especially in complex drone scenarios. To address this problem, a novel adaptive response reasoning approach is proposed for CF learning. It can leverage temporal information in filter training and significantly promote the robustness of the tracker. Specifically, the proposed response reasoning method goes beyond the standard response consistency requirement and constructs an auxiliary label of the current sample. Besides, it helps learn a generic relationship between the previous and current filters, thereby realizing self-regulated filter updating and enhancing the discriminability of the filter. Extensive experiments on four wellknown challenging UAV tracking benchmarks with 278 videos sequences show that the presented method yields superior results to 40 state-of-the-art trackers with real-time performance on a single CPU, which is suitable for UAV online tracking missions.
 Main difference between the proposed ReCF and SRDCF.
Main difference between the proposed ReCF and SRDCF.