Abstract
Visual tracking is adopted to extensive unmanned aerial vehicle (UAV)-related applications, which leads to a highly demanding requirement on the robustness of UAV trackers. However, adding imperceptible perturbations can easily fool the tracker and cause tracking failures. This risk is often overlooked and rarely researched at present. Therefore, to help increase awareness of the potential risk and the robustness of UAV tracking, this work proposes a novel adaptive adversarial attack approach, i.e., Ad2Attack, against UAV object tracking. Specifically, adversarial examples are generated online during the resampling of the search patch image, which leads trackers to lose the target in the following frames. Ad2Attack is composed of a direct downsampling module and a super-resolution upsampling module with adaptive stages. A novel optimization function is proposed for balancing the imperceptibility and efficiency of the attack. Comprehensive experiments on several well-known benchmarks and real-world conditions show the effectiveness of our attack method, which dramatically reduces the performance of the most advanced Siamese trackers.
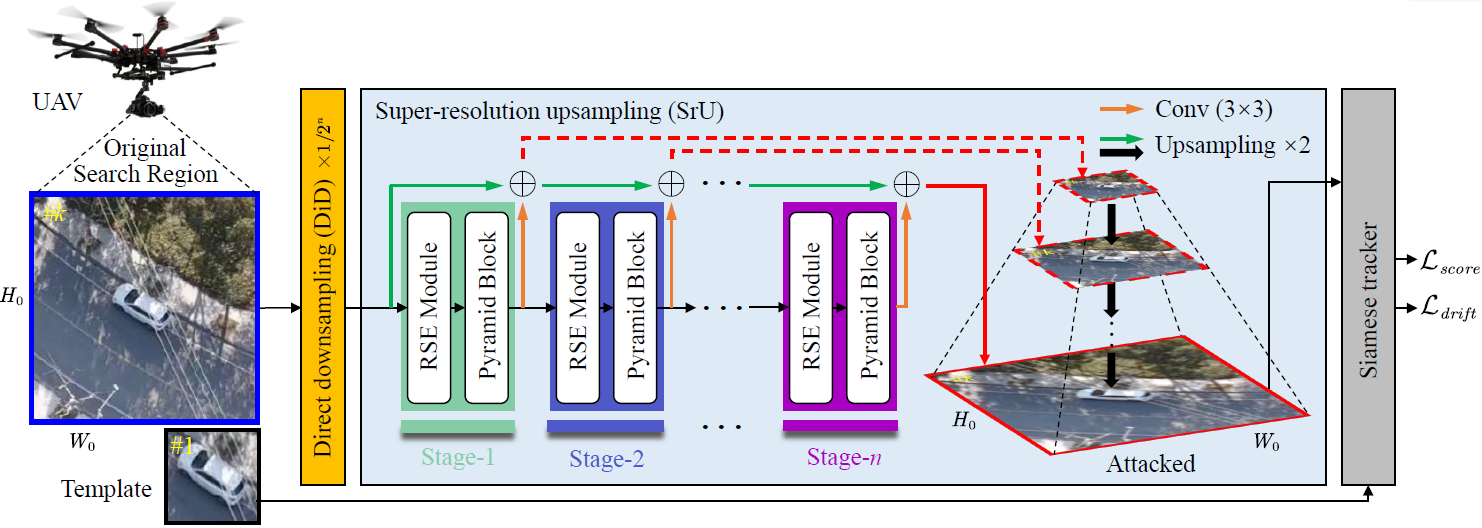 Overview of our Ad2Attack pipeline.
Overview of our Ad2Attack pipeline.