Abstract
Object feature pollution is one of the burning issues in vision-based UAV tracking, commonly caused by occlusion, fast motion, and illumination variation. Due to the contaminated information in the polluted object features, most trackers fail to precisely estimate the object location and scale. To address the above disturbing issue, this work proposes a novel end-to-end feature decontaminated network for efficient and effective UAV tracking, i.e., FDNT. FDNT mainly includes two modules, a decontaminated downsampling network and a decontaminated upsampling network. The former reduces the interference information of the feature pollution and enhanced the expression of the object location information with two asymmetric convolution branches. The latter restores the object scale information with the super-resolution technology-based low-to-high encoder, achieving a further decontamination effect. Moreover, a novel pooling distance loss is carefully developed to assist the decontaminated downsampling network in concentrating on the critical regions with the object information. Exhaustive experiments on three well-known benchmarks validate the effectiveness of FDNT, especially on the sequences with feature pollution. In addition, real-world tests show the efficiency of FDNT with 31.4 frames per second. The code and demo videos are available at https://github.com/vision4robotics/FDNT.
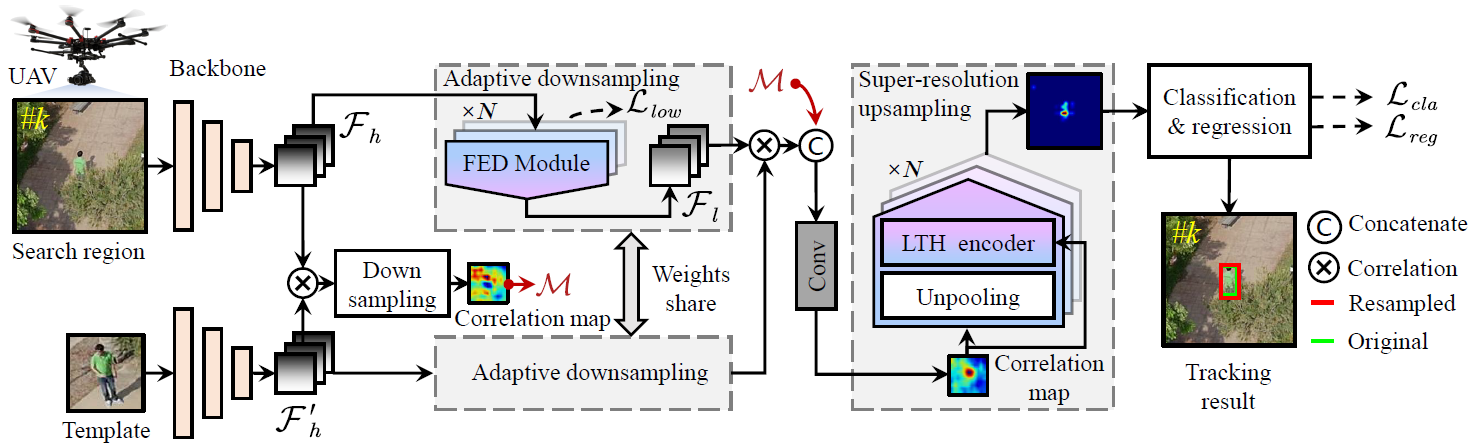 Overview of the proposed FDNT tracker.
Overview of the proposed FDNT tracker.