Aviation Fastener Rotation Detection for Intelligent Optical Perception with Edge Computing
Abstract
Aiming at the problems of low efficiency, high cost and poor accuracy in existing methods in aviation fastener sorting process, a rotation target detection method for intelligent optical perception with edge computing was proposed. To further improve the performance of the target detection model, a feature fusion mechanism based on enhanced semantics and optimized space was constructed. A type of dilated ghost module to lower the parameter quantity of the feature fusion network was designed, and enable the edge computing deployment in industrial scenes. Using the Gaussian-like circular smooth label method, the rotation target detection was realized on the prediction branch of the model detection layer, which significantly enhanced model detection performance and was more favorable for automated grasping of industrial robots. The detection accuracy on the authoritative public rotation dataset reached 77.16%. Finally, the proposed detection method was implemented in an embedded intelligent device. The edge computing deployment shows that the total accuracy reaches 99.76%, and the inference speed is more than 20 frames per second (FPS), which is sufficient for industrial applications.
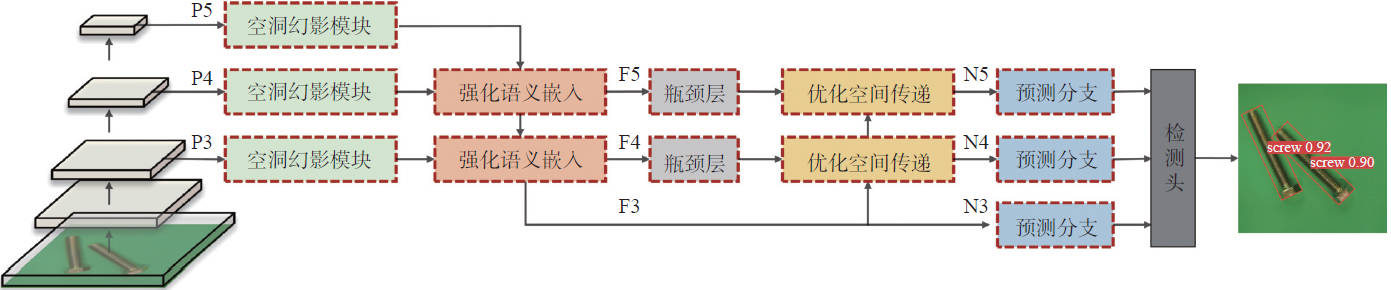 Lightweight aviation fastener rotation detection method.
Lightweight aviation fastener rotation detection method.