Abstract
Domain adaptation (DA) has demonstrated significant promise for real-time nighttime unmanned aerial vehicle (UAV) tracking. However, the state-of-the-art (SOTA) DA still lacks the potential object with accurate pixel-level location and boundary to generate the high-quality target domain training sample. This key issue constrains the transfer learning of the real-time daytime SOTA trackers for challenging nighttime UAV tracking. Recently, the notable Segment Anything Model (SAM) has achieved remarkable zero-shot generalization ability to discover abundant potential objects due to its huge data-driven training approach. To solve the aforementioned issue, this work proposes a novel SAM-powered DA framework for real-time nighttime UAV tracking, i.e., SAM-DA. Specifically, an innovative SAM-powered target domain training sample swelling is designed to determine enormous high-quality target domain training samples from every single raw nighttime image. This novel one-to-many method significantly expands the high-quality target domain training sample for DA. Comprehensive experiments on extensive nighttime UAV videos prove the robustness and domain adaptability of SAM-DA for nighttime UAV tracking. Especially, compared to the SOTA DA, SAM-DA can achieve better performance with fewer raw nighttime images, i.e., the fewer-better training. This economized training approach facilitates the quick validation and deployment of algorithms for UAVs. The code is available at https://github.com/vision4robotics/SAM-DA.
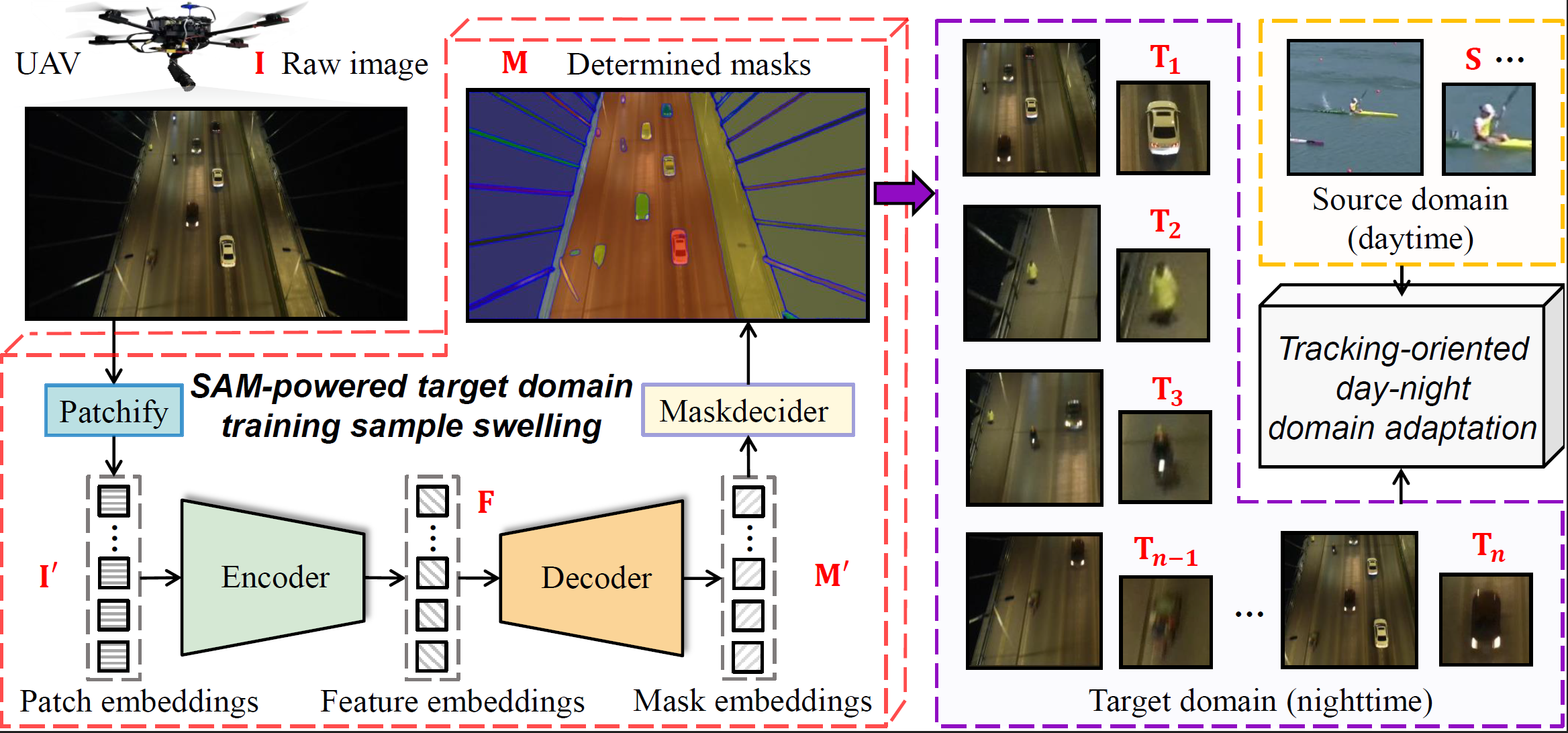 Overview of our SAM-DA.
Overview of our SAM-DA.