Abstract
Vision-based object tracking has boosted extensive autonomous applications for unmanned aerial vehicles (UAVs). However, the frequent maneuvering flight and viewpoint change are prone to cause nerve-wracking challenges, e.g., aspect ratio change and scale variation. The cross-correlation operation’s weak ability to mine perceptual similarity and easy introduction of background information become more apparent when confronted with these challenges. To address these issues, this work proposes a novel saliency-guided dynamic vision Transformer (SGDViT) for UAV tracking. Specifically, a UAV taskoriented object saliency mining network is designed to refine the perceptual similarity indicated by cross-correlation operation, distinguishing the foreground and background preliminarily. Furthermore, an innovative saliency adaption embedding operation is developed to generate dynamic tokens based on the initial saliency, reducing the computational complexity of the Transformer structure. On this bases, a lightweight saliency filtering Transformer is implemented to refine the saliency information and increase attention to the appearance information. Comprehensive evaluations on three authoritative UAV tracking benchmarks and real-world tests have proven the effectiveness and robustness of the proposed method. The source code and demo videos are available at https://github.com/vision4robotics/SGDViT.
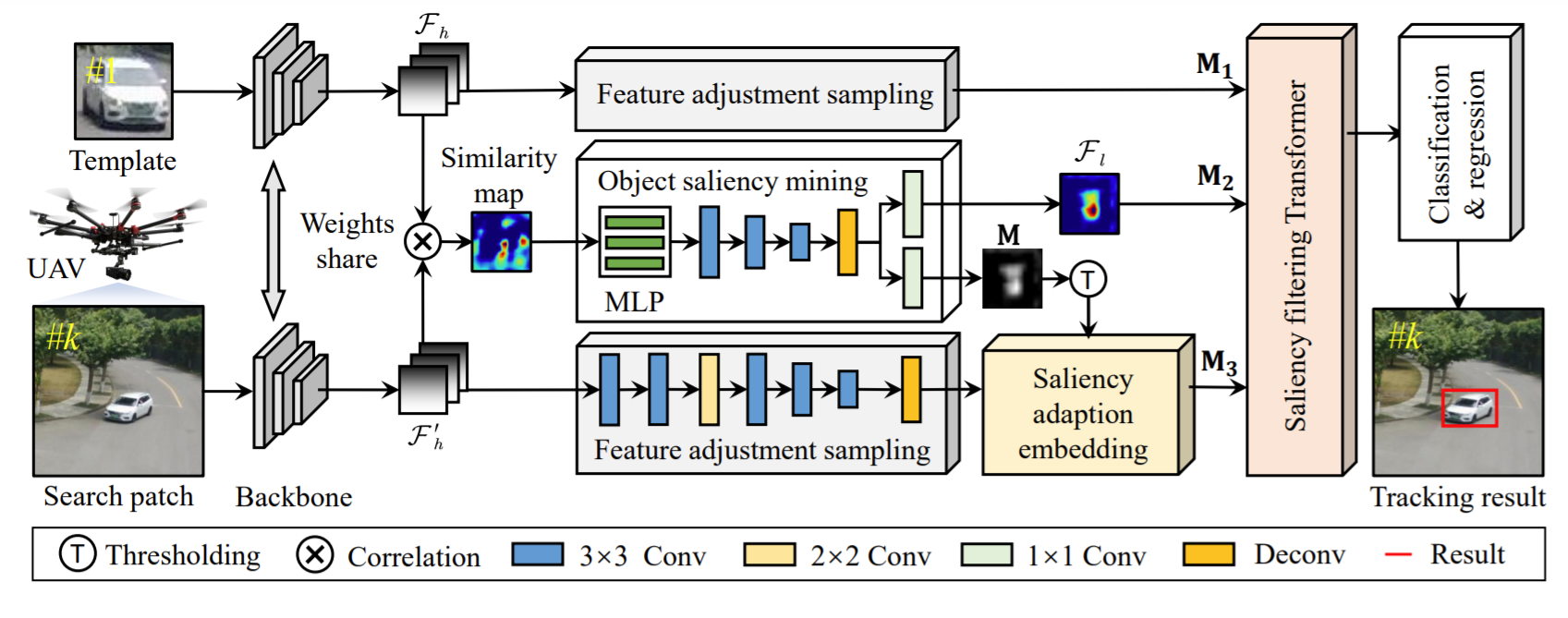 Overview of the proposed SGDViT tracker.The parts from the left to right are the feature extraction network, object saliency mining network, feature adjustment sampling network, saliency filtering Transformer, and classification & regression network, respectively.
Overview of the proposed SGDViT tracker.The parts from the left to right are the feature extraction network, object saliency mining network, feature adjustment sampling network, saliency filtering Transformer, and classification & regression network, respectively.