Semantics-Aware Receding Horizon Planner for Object-Centric Active Mapping
Abstract
The escalating demands for real-time scene comprehension in modern industries underscore the growing significance of semantic information in the daily tasks of robots, particularly in areas like autonomous inspection and target searching. This letter introduces a semantics-aware receding horizon planner (SARHP) for efficiently building the object-centric volumetric map. It includes a multi-layer mapping strategy and a semantics-aware frontier detection and planning method. With the multi-layer map, the semantics-aware frontier detection is conducted in the local layer, and the route assessment is conducted in the Field-of-View layer, which can reduce the time cost of the planning stage. Moreover, kinematic cost, geometric cost, and semantic cost are considered in the planner to ensure high search performance for semantic objects without affecting the overall mapping efficiency. The effectiveness of the proposed mapping and planning algorithm is validated in simulation and real-world experiments.
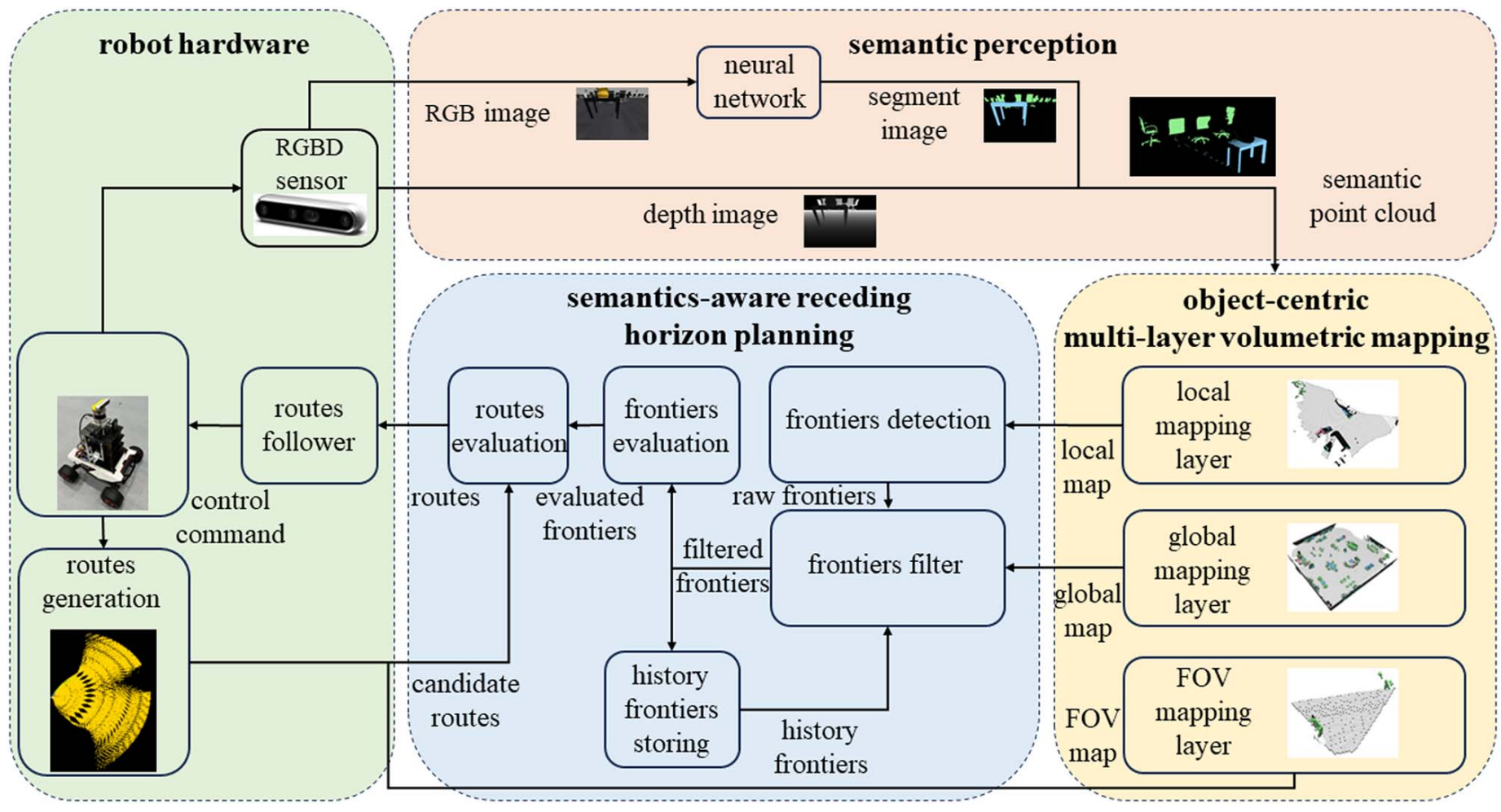 Overview of our SARHP.
Overview of our SARHP.