Abstract
Unmanned aerial vehicle (UAV)-based visual object tracking has enabled a wide range of applications and attracted increasing attention in the field of remote sensing because of its versatility and effectiveness. As a new force in the revolutionary trend of deep learning, Siamese networks shine in visual object tracking with their promising balance of accuracy, robustness, and speed. Thanks to the development of embedded processors and the gradual optimization of deep neural networks, Siamese trackers receive extensive research and realize preliminary combinations with UAVs. However, due to the UAV’s limited onboard computational resources and the complex real-world circumstances, aerial tracking with Siamese networks still faces severe obstacles in many aspects. To further explore the deployment of Siamese networks in UAV tracking, this work presents a comprehensive review of leading-edge Siamese trackers, along with an exhaustive UAV-specific analysis based on the evaluation using a typical UAV onboard processor. Then, the onboard tests are conducted to validate the feasibility and efficacy of representative Siamese trackers in real-world UAV deployment. Furthermore, to better promote the development of the tracking community, this work analyzes the limitations of existing Siamese trackers and conducts additional experiments represented by low-illumination evaluations. In the end, prospects for the development of Siamese UAV tracking in the remote sensing field are discussed. The unified framework of leading-edge Siamese trackers, i.e., code library, and the results of their experimental evaluations are available at https://github.com/vision4robotics/SiameseTracking4UAV.
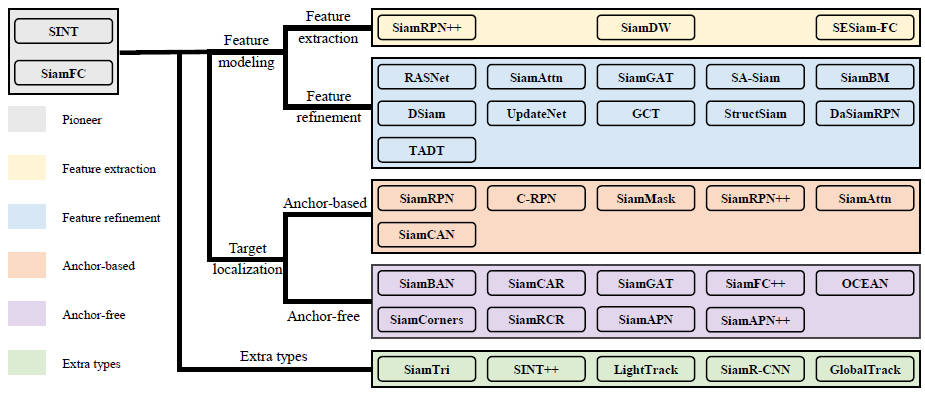 The category of leading-edge Siamese trackers over the years.
The category of leading-edge Siamese trackers over the years.