Siamese Object Tracking for Vision-Based UAM Approaching with Pairwise Scale-Channel Attention
Abstract
Although the manipulating of the unmanned aerial manipulator (UAM) has been widely studied, vision-based UAM approaching, which is crucial to the subsequent manipulating, generally lacks effective design. The key to the visual UAM approaching lies in object tracking, while current UAM tracking typically relies on costly model-based methods. Besides, UAM approaching often confronts more severe object scale variation issues, which makes it inappropriate to directly employ state-of-the-art model-free Siamese-based methods from the object tracking field. To address the above problems, this work proposes a novel Siamese network with pairwise scale-channel attention (SiamSA) for vision-based UAM approaching. Specifically, SiamSA consists of a pairwise scale-channel attention network (PSAN) and a scale-aware anchor proposal network (SA-APN). PSAN acquires valuable scale information for feature processing, while SA-APN mainly attaches scale awareness to anchor proposing. Moreover, a new tracking benchmark for UAM approaching, namely UAMT100, is recorded with 35K frames on a flying UAM platform for evaluation. Exhaustive experiments on the benchmarks and real-world tests validate the efficiency and practicality of SiamSA with a promising speed. Both the code and UAMT100 benchmark are now available at https://github.com/vision4robotics/SiamSA.
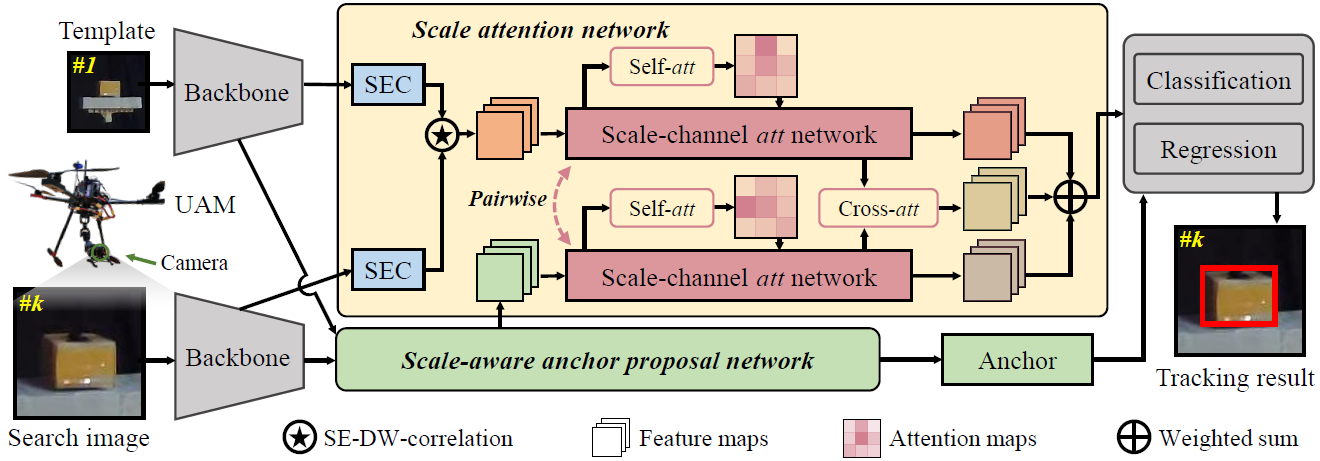 An overview of the proposed Siamese tracking with pairwise scale-channel attention (SiamPSA) for UAM approaching.
An overview of the proposed Siamese tracking with pairwise scale-channel attention (SiamPSA) for UAM approaching.