Abstract
In many industrial applications of unmanned aerial manipulator (UAM), visual approaching to the object is crucial to subsequent manipulating. In comparison with the widely-studied manipulating, the key to efficient vision-based UAM approaching, i.e., UAM object tracking, is still limited. Since traditional model-based UAM tracking is costly and cannot track arbitrary objects, an intuitive solution is to introduce state-of-the-art model-free Siamese trackers from the visual tracking field. Although Siamese tracking is most suitable for the onboard embedded processors, severe object scale variation in UAM tracking brings formidable challenges. To address these problems, this work proposes a novel model-free scale-aware Siamese tracker (SiamSA). Specifically, a scale attention network is proposed to emphasize scale awareness in feature processing. A scale-aware anchor proposal network is designed to achieve anchor proposing. Besides, two novel UAM tracking benchmarks are first recorded. Comprehensive experiments on benchmarks validate the effectiveness of SiamSA. Furthermore, real-world tests also confirm practicality for industrial UAM approaching tasks with high efficiency and robustness.
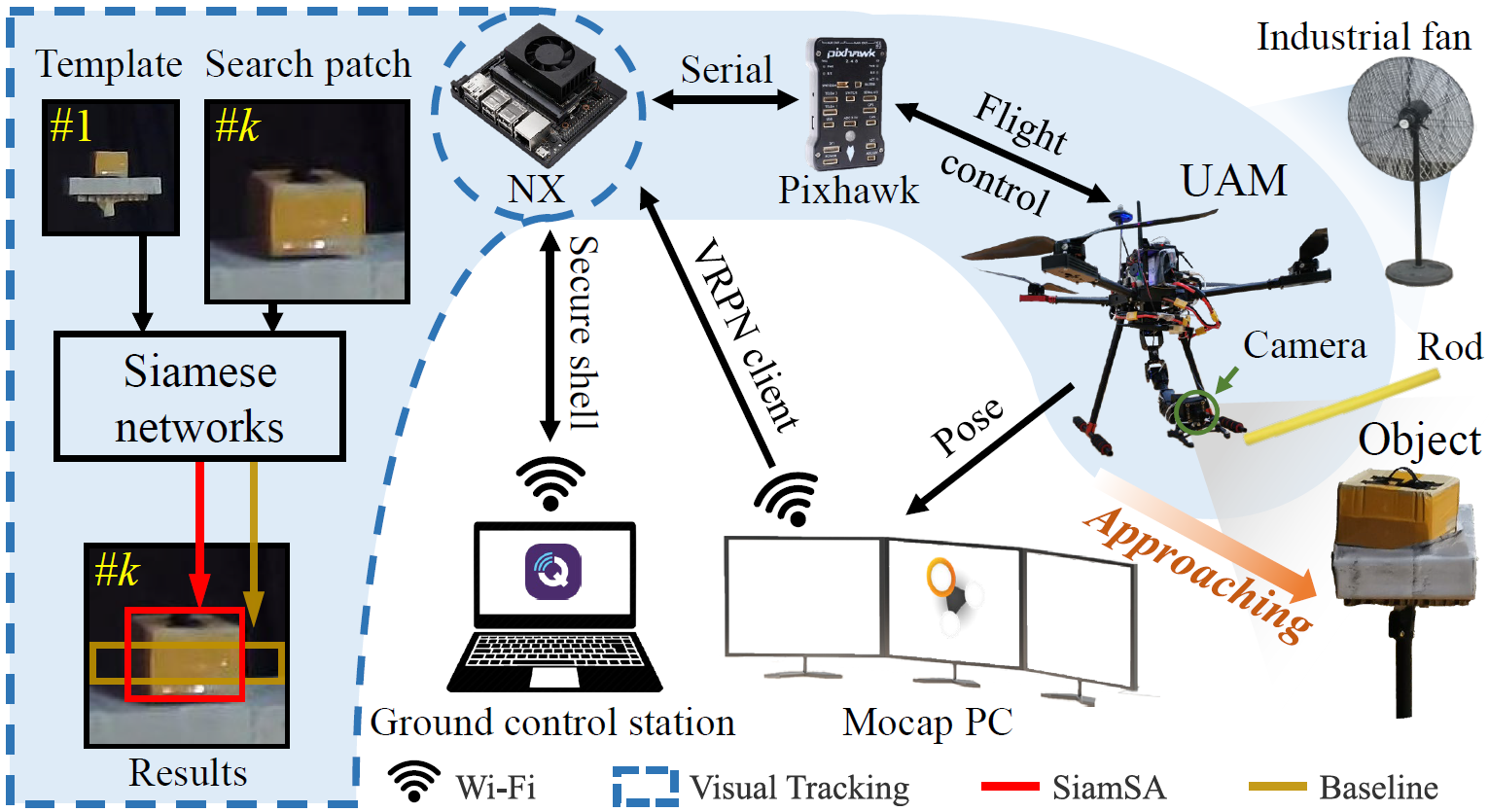 Demonstration of the vision-based UAM approaching system and qualitative comparison.
Demonstration of the vision-based UAM approaching system and qualitative comparison.